“Al jaren zijn verschillende opbrengstmeetsystemen beschikbaar voor aardappelrooiers”, vertelt Pieter Galle, productmanager bij AVR. “Een van de nadelen van deze systemen is dat het slechts weegcellen zijn die een bepaalde waarde doorgeven. Het systeem kan geen onderscheid maken tussen aardappelen en kluiten of stenen. Het AVR-kalibermeetsysteem op basis van cameradata herkent eerst de aardappelen in de productstroom en meet ze daarna. De gegevens die worden weergegeven, zijn bijgevolg honderd procent relevant.”
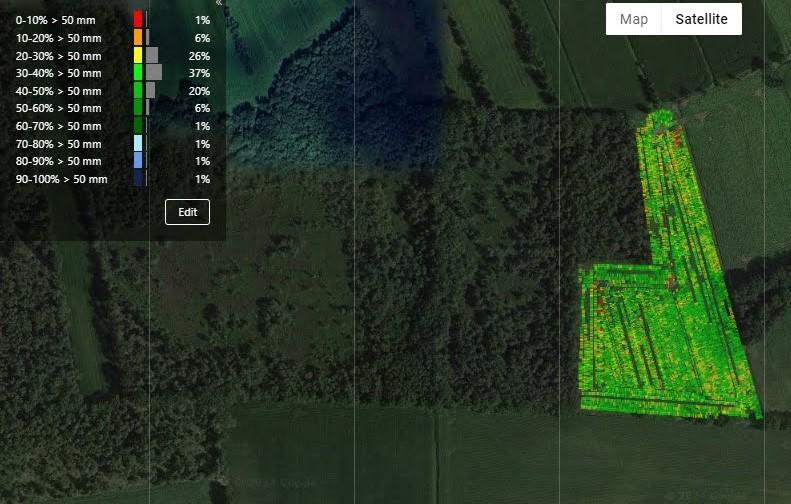
Het aardappelkaliber is een erg belangrijke kwaliteitsparameter binnen de aardappelteelt. “Denk maar aan pootgoed, aardappelen voor de versmarkt en de frietindustrie. Als teler kun je zien welk aandeel van de geoogste aardappelen de gewenste kalibermaat heeft. Deze kalibermeting past in de huidige precisielandbouw. De kennis over alle input is al aanwezig, maar nu wordt ook de data van het resultaat beschikbaar”, besluit Galle. “En niet enkel in het aantal vrachtwagens per veld, maar ook met de bijhorende positie of zone in het veld.”